Det hører til dagligdagens mere simple gøremål at skrue et låg af og på et syltetøjsglas. I hvert fald hvis du er et menneske og ikke en robot.
Hvis du vil have en robot til at klare den opgave, skal du først finde en måde at fastholde syltetøjsglasset på. Så skal robotten lære, at det ikke er ligegyldigt, hvordan den griber fat om låget, hvordan den vender låget, og hvor meget kraft den bruger til at skrue låget på.
Faktisk er det så kompliceret at lære robotter den type opgaver, at det kan holde robotforskere beskæftiget i årevis. Ikke med samlingen af et syltetøjsglas naturligvis, men med lignende montageopgaver i industrien.
– At få et emne rigtigt hen til en robot er en udfordring i stort set alle tilfælde, hvor man vil have en robot til at lave samleoperationer. Det er en flaskehals for, hvor hurtigt hele processen kan foretages, fortæller Simon Mathiesen, postdoc ved Syddansk Universitet og i MADE-forskningen inden for robotteknologi.
Read English summary of the article
Håndtering af små produktserier
Han startede i 2014 som ph.d. i MADE SPIR-platformen og er efter at have forsvaret sin afhandling i slutningen af 2017 fortsat som postdoc i den nye platform, MADE Digital.
Og selvom han er robotforsker ved SDU og i MADE, så har han altså fokus på noget, som befinder sig uden om robotten. Nemlig udfordringen med at få emner hen til en robot – i robotkredse kaldet emnefødning – og at gøre en løsning på denne udfordring så fleksibel og billig som mulig.
Det sidste er ikke mindst efterspurgt hos mange især små og mellemstore virksomheder, som producerer små serier med høj variation. De efterspørger robotløsninger, der nemt kan omstilles mellem de forskellige opgaver – altså som ville kunne skrue låg på et syltetøjsglas i dag, men skrue låg på en sodavandsflaske i morgen, for at blive ved det indledende eksempel.
– Vi har taget fat i en kendt teknologi, men så prøvet at gøre den mere bredt anvendelig for nogle af de cases, vi har arbejdet med, nemlig små produktserier med høj variation, siger Simon Mathiesen.
Teknologien, der er tale om, er de såkaldte vibrationsskålfødere.
Her putter man en masse af det samme emne, f.eks. skruer, ned i en skål, hvor der på indersiden løber et speciallavet spor.
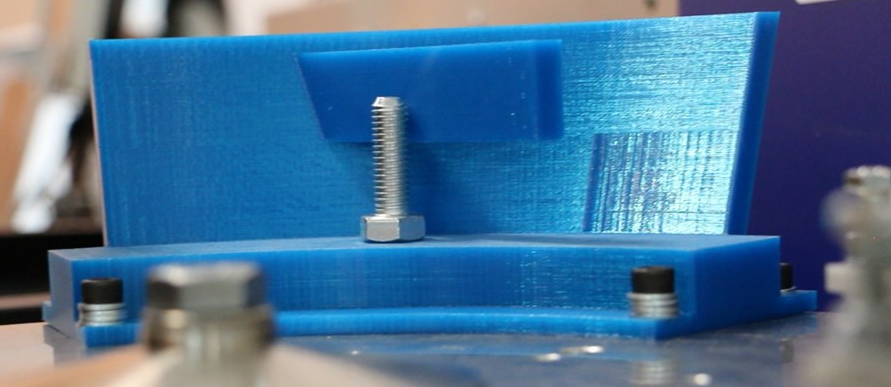
En traditionel løsning til at føde en robot: Skruen her følger et spor, men bliver afvist og skubbet væk undervejs, hvis ikke den er i en bestemt position, som robotten kan håndtere skruen i.
– Ved at sætte skålen under vibration kan du få emnerne til at hoppe langs sporet og få dem til at lægge sig på en bestemt måde afhængig af deres tyngdepunkt og geometri, forklarer den unge forsker og fortsætter:
– Undervejs bruges så mekaniske afvisningsmekanismer for at sikre, at emnerne kun når forbi et vist punkt på skålen, hvis de ligger på en bestemt måde.
På den måde kan man eksempelvis sikre, at en skrue kun kommer frem til robotten i en position, hvor den på korrekt vis kan blive grebet og skruet fast ind i et andet emne eller produkt af robotten.
Billigere løsning nødvendig
Løsningen med vibrationsskåle er en klassisk måde at løse problemet med at få emner hen til en robot på. Men den har også en ulempe: Prisen.
– Selve skålene koster ikke meget at fremstille, men de bliver alligevel dyre på grund af den tid, det tager at udvikle dem. Og én skål kan som udgangspunkt kun bruges til ét formål, forklarer Simon Mathiesen.
I sin ph.d. undersøgte han således, om man med ved hjælp af avanceret computersimulering kunne gøre udviklingen af skålene hurtigere – og dermed billigere.
– Der er et økonomisk potentiale, hvis man kan bruge computeren til at gøre udviklingen af de her vibrationsskålfødere billigere og nemmere. Så behøver du nemlig som virksomhed ikke retfærdiggøre, at de ikke bliver brugt 24 timer i døgnet, når du har købt én, siger Simon Mathiesen og forklarer, hvorfor det giver mening at bruge computersimulering af avancerede processer:
– Med simuleringer – særligt hvor du også tager højde for det dynamiske i en proces, f.eks. friktion mellem emner – kan man måle ret præcist, hvor god en løsning vil være. Man kan således lave alle tilpasningerne digitalt, indtil man har en løsning, som det er værd at fremstille i virkeligheden.
Der er et økonomisk potentiale, hvis man kan bruge computeren til at gøre udviklingen af de her vibrationsskålfødere billigere og nemmere
Simon Mathiesen, MADE-postdoc, Syddansk Universitet
Tryk på en knap
I sin forskning har han arbejdet tæt sammen med virksomheder som Danfoss og nu især elektronikproducenten Danchell. De har leveret cases i form af emner og været med til løbende at teste og give feedback på den software, Simon Mathiesen har udviklet.
Det store, endegyldige mål er, at man som virksomhed blot skal komme med en præcis CAD-model af sit emne, trykke på en enkelt knap på computeren, og så får man med det samme det færdige design af en vibrationsskålføder, som eventuelt kan 3D-printes.
Så langt er Simon Mathiesen og resten af robotforskerne dog ikke endnu. Men arbejdet med at videreudvikle og finpudse softwaren fortsætter i MADE Digital.
– Jeg har lavet noget software med forskellige funktionaliteter, som vi har vist, at vi kan bruge til noget. Nu er det så opgaven at føre det videre til noget, som andre end mig kan bruge, og det skal pakkes ind i en mere komplet pakke og modnes i det hele taget, fastslår Simon Mathiesen.